Encounter | Interactive Environment Prototype from Krupali on Vimeo.
Sunday, May 1, 2011
Tuesday, March 22, 2011
concept description
ENCOUNTER is an art installation proposed to be positioned in a mall in Hong Kong. It is a responsive space that is controlled by two people among the crowd who have something in common. The idea is to highlight two strangers who share a common appearance or behaviour and give them a sense of control, together, over the space. In busy public spaces hundreds of people cross paths everyday without much of an interaction or even noticing each other. Our installation hopes to create a moment of acknowledgement and appreciation of someone who could perhaps have a lot in common with you.
Persons in the crowd are scanned for similarities based on pre-decided parameters of appearance; such as colour of clothes, or behaviour; such as talking on the phone, carrying a baby, etc. and a pair is identified. These two individuals in the chosen pair control the motion of the ceiling above them. As they move, the object above them moves and upon crossing each other’s paths, the whole ceiling celebrates their similarity by making an extensive pattern before it resets to default appearance.
Tuesday, March 15, 2011


















Wednesday, March 9, 2011
bugs
The program so far:-
WHAT IT DOES:
-Attaches motor 1-6 on pins 0,1,2,3,4,5
-Attaches switch 1-6 on pins 6,7,8,9,10,11
-Switch turns corresponding motor clockwise and anticlockwise 3 times
-Loop continues if switch is continuously pressed.
/////////////////////////////////////////////////////////////////////////
WHAT IT SHOULD DO BUT DOES NOT:
- Allow 2 motors to be active simultaneously
-Decrease speed both when going clockwise and anticlockwise
////////////////////////////////////////////////////////////////////////
NEXT STEPS:
-attach and program 'Formation Motors'
- fix above two problems
///////////////////////////////////////////////////////////////////////
#include <Servo.h>
#define NBR_SERVOS 6 // the number of servos
int motnum;
int beginDegree=30;
int endDegree=90;
Servo Servos[NBR_SERVOS] ; // max servos is 48 for mega, 12 for other boards
void setup()
{
for (int i=0; i <NBR_SERVOS; i++){
Servos[i].attach(i); // attaches 6 motors on pins 0,1,2,3,4,5
pinMode(i+6, INPUT); //attaches swtiches on 6,7,8,9,10,11
}
}
void loop()
{
for (int j=0; j< NBR_SERVOS; j++){
if(digitalRead(j+6)==HIGH){
for (int redo=0; redo<3; redo++){
{
for (int x=beginDegree; x<endDegree; x+=2){
Servos[j].write(x); delay(50);
}
for (int y=endDegree; y<beginDegree; y-=2){
Servos[j].write(y); delay(50);
}
}
}
}
else if (digitalRead(j+6)==LOW){
Servos[j].write(endDegree);
}
}
}
WHAT IT DOES:
-Attaches motor 1-6 on pins 0,1,2,3,4,5
-Attaches switch 1-6 on pins 6,7,8,9,10,11
-Switch turns corresponding motor clockwise and anticlockwise 3 times
-Loop continues if switch is continuously pressed.
/////////////////////////////////////////////////////////////////////////
WHAT IT SHOULD DO BUT DOES NOT:
- Allow 2 motors to be active simultaneously
-Decrease speed both when going clockwise and anticlockwise
////////////////////////////////////////////////////////////////////////
NEXT STEPS:
-attach and program 'Formation Motors'
- fix above two problems
///////////////////////////////////////////////////////////////////////
#include <Servo.h>
#define NBR_SERVOS 6 // the number of servos
int motnum;
int beginDegree=30;
int endDegree=90;
Servo Servos[NBR_SERVOS] ; // max servos is 48 for mega, 12 for other boards
void setup()
{
for (int i=0; i <NBR_SERVOS; i++){
Servos[i].attach(i); // attaches 6 motors on pins 0,1,2,3,4,5
pinMode(i+6, INPUT); //attaches swtiches on 6,7,8,9,10,11
}
}
void loop()
{
for (int j=0; j< NBR_SERVOS; j++){
if(digitalRead(j+6)==HIGH){
for (int redo=0; redo<3; redo++){
{
for (int x=beginDegree; x<endDegree; x+=2){
Servos[j].write(x); delay(50);
}
for (int y=endDegree; y<beginDegree; y-=2){
Servos[j].write(y); delay(50);
}
}
}
}
else if (digitalRead(j+6)==LOW){
Servos[j].write(endDegree);
}
}
}



Tuesday, March 8, 2011
Saturday, March 5, 2011
Friday, March 4, 2011

Radiant Film
Selection of film


We plan to pass light through the transparent film in the ceiling to create effects on the floor and have a while backing for the same film on the polygons.
Thursday, March 3, 2011







Wednesday, March 2, 2011
Refining Mechanism

 |
| Claw mechanism to open and close each polygon, controlled by one motor |
NEXT STEPS:
1. Buy Motors and implement claw
2. Program basic switch
3. Meet 3M representative for material on Friday
Monday, February 28, 2011






Friday, February 25, 2011






Wednesday, February 23, 2011
Final shape for reflective ceiling | Prototype 2
rigid material





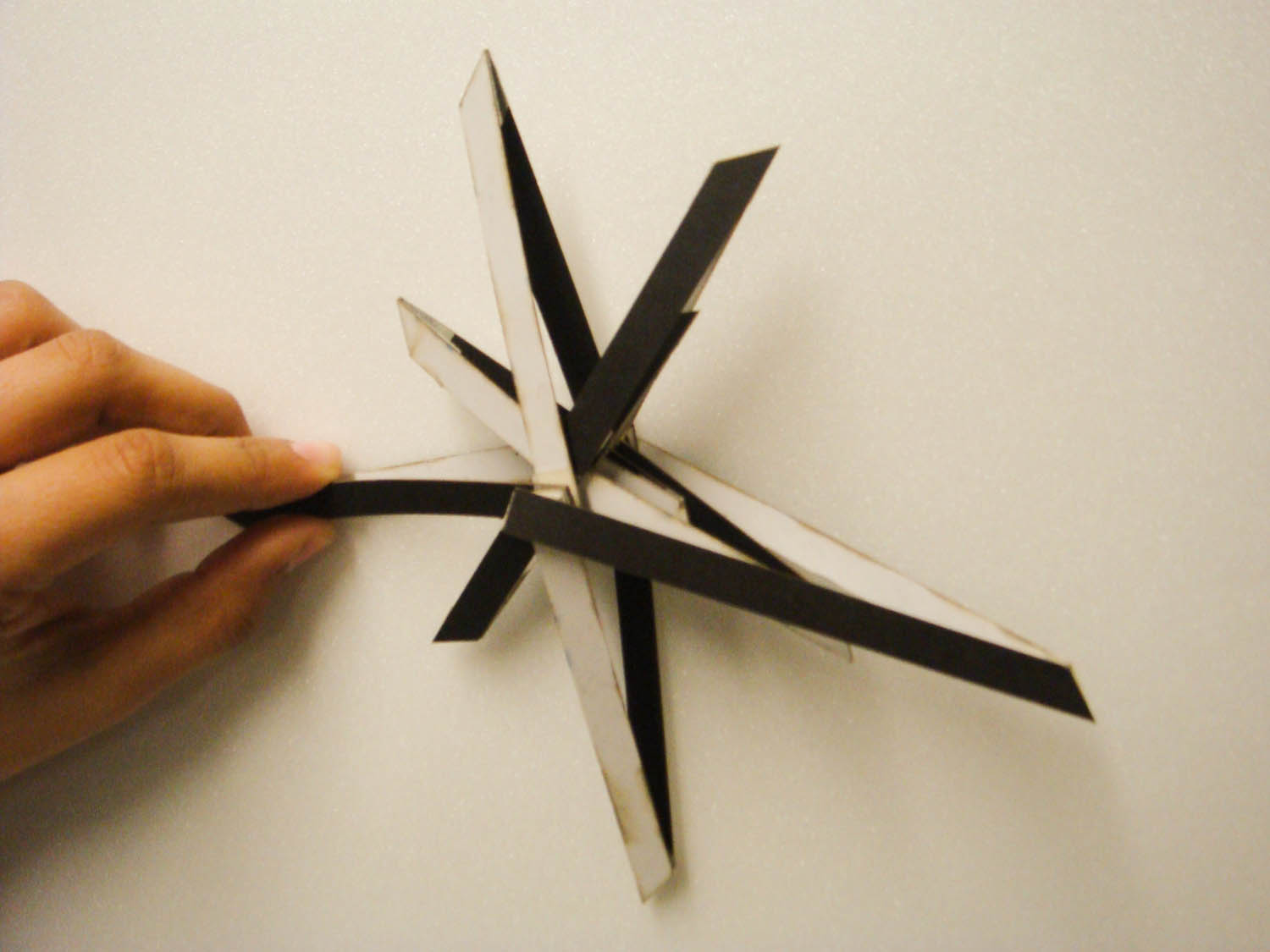
Inspiration for working out bending movement with this rigid material:
Rigid Origami http://www.youtube.
Subscribe to:
Posts (Atom)